Aus unserem BLOG • Von ZF • Oktober 2022
Wie Künstliche Intelligenz die Vorhersage kritischer Situationen beim automatisierten Fahren präzisiert
Um Gefahren frühzeitig zu erkennen, müssen autonom fahrende Autos das Verhalten anderer Verkehrsteilnehmer selbstständig einschätzen. Der Technologiekonzern ZF, die Technische Universität Dortmund und der Entwicklungsdienstleister INGgreen erforschen, wie maschinelles Lernen diese Vorhersagen optimiert.
Ein Fußgänger blickt auf die gegenüberliegende Straßenseite und richtet seine Aufmerksamkeit im nächsten Moment wieder auf sein Smartphone. Zeitgleich nähert sich mit hohem Tempo ein Radfahrer auf dem zwischen Bürgersteig und Fahrbahn angelegten Radweg. Eine typische Verkehrssituation in vielen Städten, bei der völlig offen ist, wie sie sich in den darauffolgenden Sekunden weiterentwickelt: Konzentriert sich der Fußgänger wieder auf sein Umfeld und bleibt auf dem Gehweg? Tritt er auf den Radweg, um die Straße zu überqueren? Kann der Radfahrer in diesem Fall noch bremsen? Oder weicht er auf die Fahrbahn aus, auf der zeitgleich Autos unterwegs sind?
Wechselwirkung von Verkehrsteilnehmern macht Erfassung komplex
Es ist diese Vielzahl an Möglichkeiten im Straßenverkehr, die die Entwicklung des autonomen Fahrens so anspruchsvoll und so vielschichtig macht, denn autonom fahrende Autos müssen die Komplexität solcher Situationen erkennen, einschätzen und aus diesen Einschätzungen die richtigen Schlüsse ziehen. Notwendig wird dies bereits von automatisierten Fahrfunktionen der Stufe 3 an, denn schon bei diesen Systemen ist es dem menschlichen Fahrer zeitweise erlaubt, seine Aufmerksamkeit vom Straßenverkehr abzuwenden und sich anderen Dingen zu widmen. Zehn Sekunden beträgt die Zeitspanne, innerhalb der der menschliche Fahrer die Kontrolle über sein Auto wieder sicher übernehmen können muss. Und in diesen Sekunden kann in der oben beschriebenen Situation viel passieren – Sekunden, in denen das Fahrzeug die entstehenden Situationen selbstständig bewältigen muss.
Das gelingt nur, wenn das Fahrzeug mögliche kritische Situationen erkennt, bevor sie entstehen. Wie Verkehrskonstellationen möglichst präzise vorhergesagt werden können, erforscht seit Anfang 2021 der Technologiekonzern ZF gemeinsam mit der Technischen Universität Dortmund und dem Entwicklungsdienstleister INGgreen. Das Projekt „KI-basierte Situationsinterpretation für das automatisierte Fahren“ (KISSaF) nutzt dafür Künstliche Intelligenz (KI), um das Verhalten anderer Verkehrsteilnehmer richtig einzuschätzen. „Mit KISSaF wollen wir einen Beitrag dazu leisten, die Sicherheit beim automatisierten Fahren zu erhöhen und die Grundlagen für das Fahren nach Level 3 und höher zu schaffen“, sagt Dr. Till Nattermann, Leiter des KISSaF-Projektes und Engineering Manager bei ZF.
Agieren statt reagieren: Der Wirklichkeit Sekunden voraus
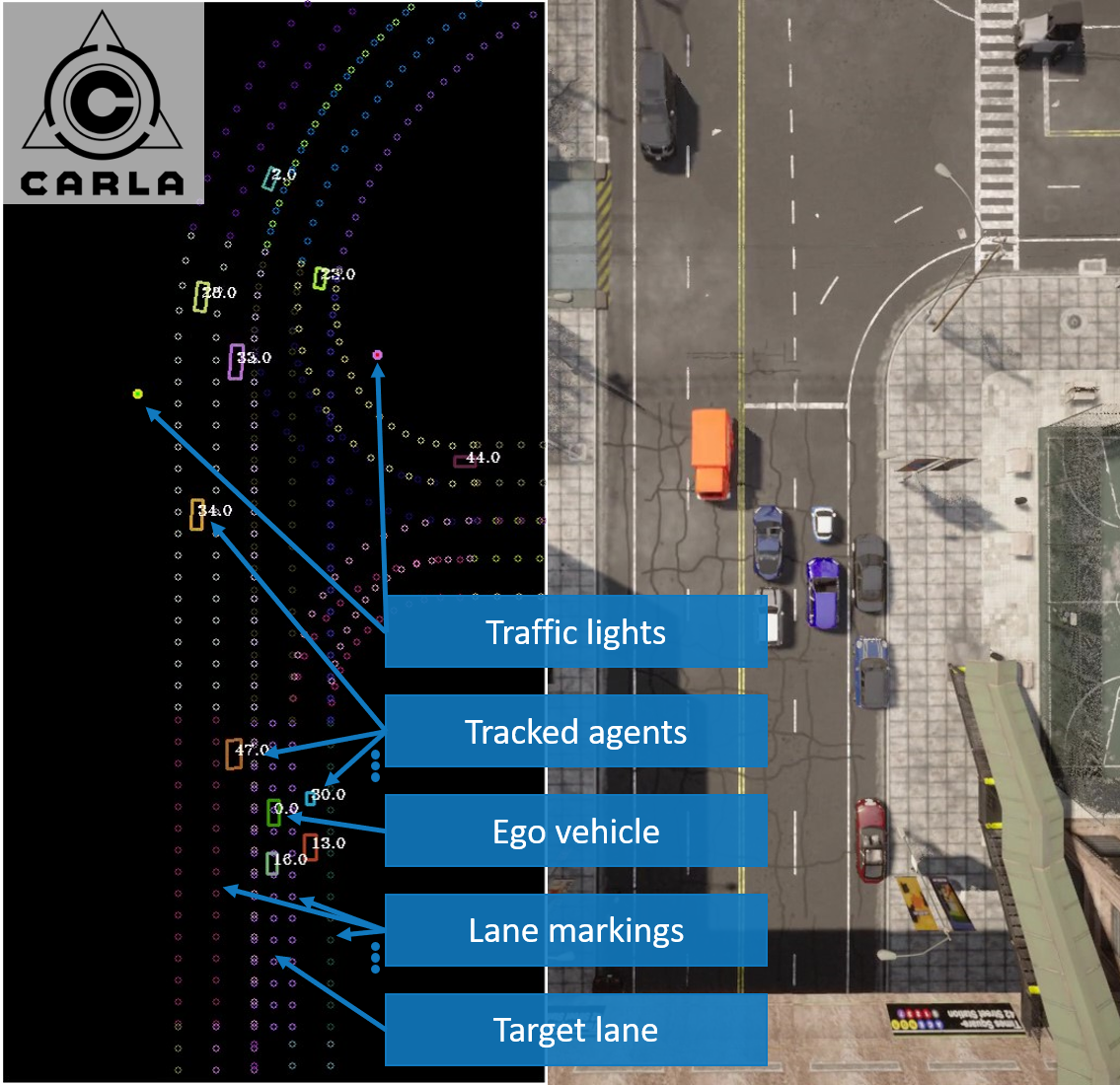
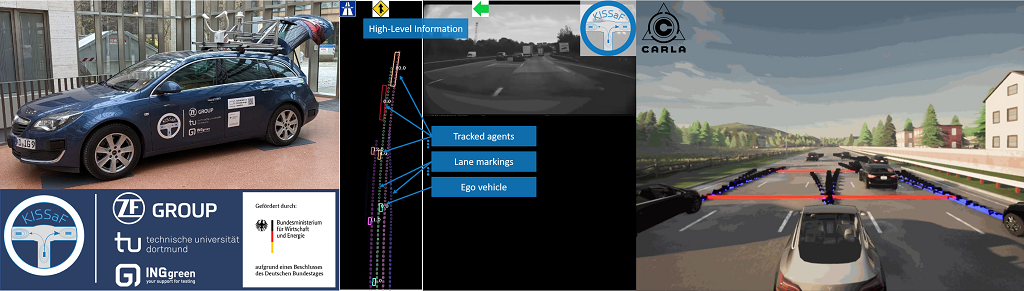
* angefertigt mit dem Carla-Simulator
Eine Voraussetzung dafür, mögliche Verkehrssituationen präzise vorherzusagen, besteht darin, dass Fahrzeuge ihr Umfeld möglichst genau erfassen und analysieren. Positionen und Geschwindigkeit anderer Verkehrsteilnehmer, die eigene Fahrzeuggeschwindigkeit, Straßenbeschaffenheit und Verkehrsschilder müssen dafür erkannt, interpretiert und miteinander in Beziehung gesetzt werden. Denn gerade die Wechselwirkung der Verkehrsteilnehmer miteinander gestaltet die Vorhersage von Verkehrssituationen komplex. KISSaF koppelt dazu eine auf KI basierende Vorschau des Verkehrsgeschehens ausgehend von den aktuellen Sensordaten mit der optimalen Trajektorienplanung des Fahrzeugs, die Geschwindigkeit und Bewegungsrichtung vorgibt. Mit Deep-Learning-Methoden werden aus der Beschreibung des Umfelds mögliche Situationsverläufe modelliert, die die KI durchspielt und nach Wahrscheinlichkeit beurteilt.
In einem ersten Schritt haben die Projektpartner dazu im virtuellen Raum ein Umweltszenerio aufgebaut, das neben dynamischen und statischen Objekten auch die Infrastruktur und den situativen Kontext enthält. Auf dieser Basis werden Methoden des maschinellen Lernens genutzt, um mögliche Szenenverläufe zu bestimmen, die dann an das Fahrzeug zurückgespielt werden. „Wir entwickeln und nutzen dafür die neuesten Methoden des maschinellen Lernens“, sagt Dr. Georg Schneider, Leiter des KI-Technologiezentrums von ZF in Saarbrücken. „Wir haben die KI bereits mit Realdaten trainiert, und es ist uns gelungen, daraus multimodale Zukunftsszenarien für verschiedene Verkehrsteilnehmer vorherzusagen.“

Grundlage für die Entwicklung und das Training der KI-Algorithmen ist ein eigens aufgenommener Datensatz. Für die Daten ist ein extra aufgebautes Messfahrzeug im realen Verkehr unterwegs, das bis Projektende auf Fahrten von einer Gesamtlänge von ca. 200.000 Kilometern Daten gesammelt haben soll. Die erfassten Daten werden dabei so aufbereitet, dass sie von einer KI interpretiert werden können. In einem ersten Schritt haben die Projektpartner eine Szenenvorschau für den Autobahnverkehr entwickelt, anschließend folgte die Entwicklung für städtische Verkehrssituationen.
In einem weiteren Schritt werden die entwickelten Modelle anhand definierter Kriterien evaluiert: Die Projektpartner haben einen Szenarienkatalog erstellt, in dem Fahrsituationen beschrieben und definiert sind. Darin sind Kriterien festgelegt, wie die Fahrfunktionen auf die Verkehrssituation bezogen werden und in ihrer Wahrscheinlichkeit eingeschätzt werden können, damit das Fahrzeug sein eigenes Fahrverhalten frühzeitig anpassen – etwa die Geschwindigkeit verringern oder ausweichen – kann, sodass dem menschlichen Fahrer genügend Zeit bleibt, das Steuern zu übernehmen.
KI-basierte Vorhersage kann die Sicherheit für das automatisierte Fahren deutlich verbessern
Das Ziel ist es, die KI-basierte Vorhersage kritischer Verkehrssituationen in bestehende automatisierte Fahrfunktionen wie etwa einen Abstandsregeltempomaten oder einen Spurwechselassistenten oder gar in ganze Systeme für das automatisierte Fahren zu integrieren. Insgesamt kann eine präzise und verlässlich arbeitende Situationserkennung die Sicherheit und den Fahrspaß in hochautomatisiert fahrenden Autos deutlich erhöhen.
Das Projekt wird vom Bundesministerium für Wirtschaft und Klimaschutz gefördert und läuft noch bis Mitte 2023.