
Aus unserem BLOG • Von Joschua Schulte-Tigges, Futive GmbH • August 2023
Filling the Gaps: Mit intelligenten Konzepten die Hürden automatisierten Fahrens überwinden
Im Bereich des automatisierten Fahrens befinden wir uns in spannenden Zeiten. Die ersten Level 3-Fahrzeuge bekommen ihre Zulassung auf deutschen Straßen und ermöglichen es, dass der Mensch die Kontrolle und Verantwortung an das Fahrzeug abgibt. Bei den Systemen handelt es sich jedoch oft um Stauassistenten oder ähnliches. Heißt: nur solange sich das Fahrzeug im Stau befindet und der Assistent aktiv ist, kann der Mensch am Steuer anderen Tätigkeiten wie z. B. Zeitung lesen nachgehen. Endet der Stau, verlangt das Fahrzeug die Kontrolle des Menschen zurück, und dies üblicherweise mit einer Übergabedauer von zehn Sekunden. Der Assistent wurde also nur für die Domäne „Stau“ designed und operiert demnach auch nur in dieser Domäne. Man spricht hier von sogenannten „Operational Design Domains“ (ODD). In einer ODD können die Kriterien definiert werden, unter denen Assistenzsysteme die Kontrolle übernehmen können. Der Weg zur vollständig eigenständigen Fahrt auf Autobahnen ohne menschliche Eingriffe ist jedoch noch weit.
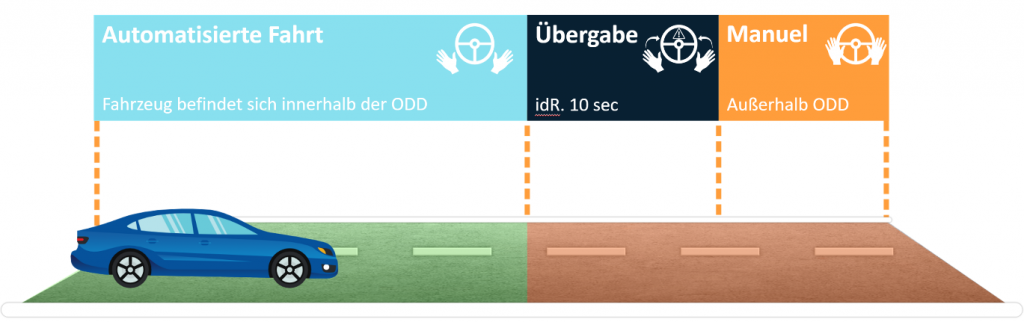
Betrachtet man beispielhaft die Voraussetzungen für den Stauassistenten, so wird deutlich, dass nicht nur der Stau selbst relevant ist, sondern auch Faktoren wie Wetterbedingungen, Tageszeit, lokale Gegebenheiten wie Tunnel oder mögliche Sensorprobleme eine Rolle spielen. Dies führt zu Herausforderungen wie Fahrten bei starkem Regen, nächtlichen Fahrten, Tunnelpassagen oder eingeschränkter Sensorik. Die derzeitigen Operational Design Domains (ODDs) erfüllen noch nicht alle Bedingungen, was zu Unterbrechungen im autonomen Fahrbetrieb führen kann. Somit stellt sich die entscheidende Frage: Wie können diese komplexen Herausforderungen effizient bewältigt werden?‘
Die Rolle von V2X als Enabler
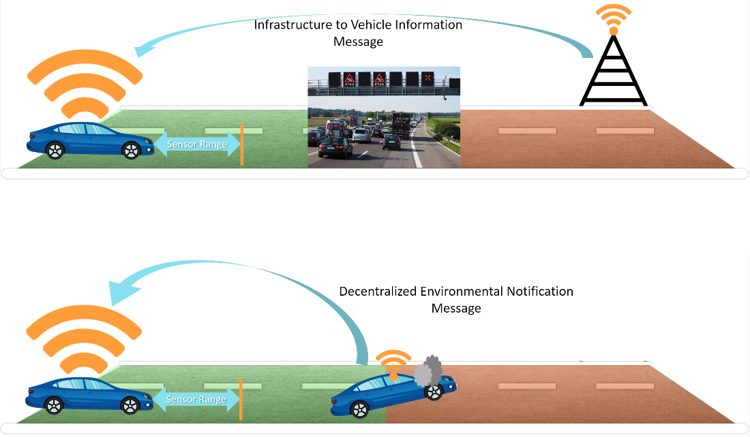
Viele Voraussetzungen sind geknüpft an die physikalischen Grenzen von Sensorik im Fahrzeug. Fährt das Fahrzeug mit 100 km/h und erkennt mit den Sensoren eine Situation, die außerhalb der ODD liegt, bleiben keine zehn Sekunden mehr, um die Kontrolle zu übergeben. Hier könnte V2X (Vehicle to Everything) Abhilfe schaffen. Schon seit vielen Jahren werden standarisierte Nachrichten entwickelt, die zum einen vor plötzlichen Ereignissen warnen oder Informationen wie Spursperrungen, Geschwindigkeitsbegrenzungen etc. übermitteln. Diese Nachrichten können sowohl von der Infrastruktur (V2I und I2V) als auch von anderen Fahrzeugen an Fahrzeuge, die entsprechend ausgestattet sind, übertragen werden (V2V).
Neue Wege der Lokalisierung mit GNSS (Globales Navigationssatellitensystem)
Weitere Anforderungen sind eher im Bereich Lokalisierung zu sehen. In Situationen, in denen ein Fahrzeug durch Tunnel oder städtische Gebiete fährt, gestaltet sich die herkömmliche Lokalisierung oft schwierig. Das effektivste System zur Bestimmung einer globalen Position ist das GNSS) Durch den Einsatz einer Basisstation zur Berechnung von Abweichungen in einem bestimmten Gebiet kann die Positionsunsicherheit kompensiert werden.
Im Folgenden werden zwei Methoden zur Ergänzung von GNSS erläutert:
a) Ankerbasierte Systeme
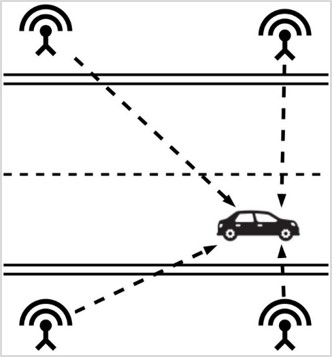
Eine Möglichkeit, um GNSS zu ergänzen, wären ankerbasierte Systeme. Diese Technologien finden weitreichende Anwendung in der Automatisierung von industriellen Innenbereichen. Bei derartigen Systemen lassen sich zwei Hauptkomponenten unterschieden: Anker und Ziel (engl. „Target“). Die Anker sind fixierte, eingemessene Sende- und Empfangseinheiten, die ununterbrochen mit dem Target kommunizieren. Das Target ist eine auf dem Zielfahrzeug fixierte Sende- und Empfangseinheit, die sich mit dem Zielfahrzeug mitbewegt.
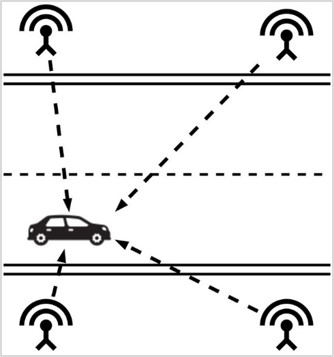
Eine Methode zur Messung besteht darin, dass entweder das Target in gewissen Zeitabständen den Ankern in seiner Reichweite Nachrichten mit Zeitstempeln sendet oder das Target mit jedem Anker in seiner Reichweite einen virtuellen Handschlag durchführt. In beiden Szenarien ist der entscheidende Faktor der Zeitstempel der Nachricht. Durch die zeitlichen Unterschiede zwischen den Ankern und den Zeitangaben des Zielobjekts lässt sich eine Distanz ermitteln. Wird die Distanz zu mehr als drei Ankerpunkten ermittelt, kann die dreidimensionale Position des Fahrzeugs bestimmt werden.
b) Visuelle Odometrien
Punktwolkenbasierte visuelle Odometrien funktionieren anders als bilderbasierte visuelle Odometrien. Eine Punktwolke beinhaltet bereits wertvolle Informationen zur Ermittlung der Bewegung eines Roboters. Sie repräsentieren die Geometrie der Umgebung mit eingemessenen 3D-Punkten. Bildbasierte visuelle Odometrien hingegen benötigen eine Vorverarbeitung, um signifikante Kennpunkte in Bildern zu ermitteln, die im Vergleich zu den Kennpunkten aus älteren Bildern eine Information über die Bewegung des Roboters wiedergibt.
Punktwolkenbasierte visuelle Odometrien verwenden Zuordnungsalgorithmen, um die Transformation zwischen einer neu eingemessenen Punktwolke und der vorhereigen zu ermitteln. Bei Vorwärtsbewegung des Fahrzeugs verschieben sich geometrisch markante Merkmale der Umgebung aus der Sicht des optischen Sensors, wie beispielsweise eines LiDAR, in entgegengesetzter Richtung. Durch Zuordnung der Punkte dieser markanten Umgebungsmerkmale lässt sich eine Schätzung darüber treffen, in welche Richtung sich das Objekt, auf dem der Sensor montiert ist, im Verhältnis zur Position der letzten eigemessenen Punktwolke bewegt hat.
Visuelle Odometrie allein reicht oft nicht aus, da sie Informationen über relative Veränderungen liefert. Der Vorteil der visuellen Odometrie liegt darin, dass sie es ermöglicht, Strukturen aus der Vergangenheit zu erkennen und neue Schätzungen durch die Nutzung von Daten aus mehreren vorangegangenen Messungen zu verfeinern. Um diese Funktionalität zu unterstützen, kommen Posengraphen zum Einsatz. Dieser ermöglicht eine effiziente Speicherung vergangener Positionen (Posen) in Verbindung mit den dazugehörigen Messdaten. Darüber hinaus beschleunigt er die Suche nach früheren Messungen und den zugehörigen Posen. Diese Merkmale ermöglichen die Implementierung einer schnellen Ortswiedererkennung sowie die rückwirkende Optimierung von Positionen.
Die Zukunft automatisierten Fahrens aktiv mitgestalten
Daniel Scholl, Geschäftsführer der Futive GmbH Aachen: „Wir sind davon überzeugt, dass punktwolkenbasierte visuelle Odometrien als Ergänzung zu GNSS, verknüpft mit weiteren innovativen Ansätzen, unumgänglich sind, um die Potentiale autonomer Fahrzeuge auszuschöpfen. Daher setzen wir entschlossen auf diese Richtung und sind zuversichtlich, dass unsere Innovationen in den kommenden Jahren die Landschaft der intelligenten Fahrzeuge positiv beeinflussen werden“.