Das Forschungsprojekt autoFerry ist von grundlegender Bedeutung für die Schifffahrtsbranche, insbesondere in Bezug auf Sicherheit und Umweltverträglichkeit. Die Entwicklung von Automatisierungssystemen für den Fährbetrieb zielt darauf ab, die Sicherheit zu erhöhen und den Kraftstoffverbrauch zu reduzieren. Mit einer Förderung durch das Bundesministerium für Wirtschaft und Klimaschutz wird dieses Projekt wichtige Fortschritte in der maritimen Technologie ermöglichen. Die Notwendigkeit für solche Innovationen wird durch die aktuellen Herausforderungen in der Schifffahrt unterstrichen, wie den Mangel an qualifizierten Schiffsführer:innen und die steigenden Anforderungen an Umweltschutz und Energieeffizienz.
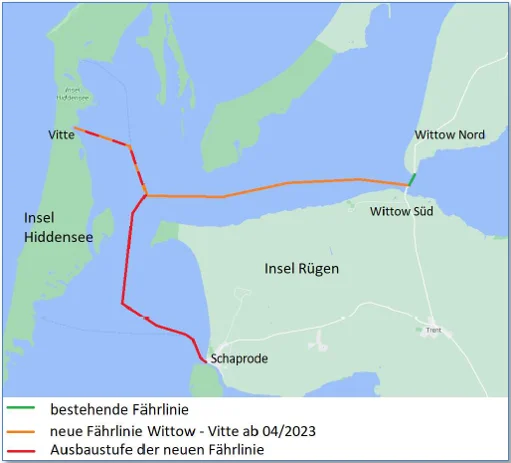
Das autoFerry-Projekt ist besonders in Hinblick auf seine praktische Anwendung motiviert. Die Forschung konzentriert sich auf die Automatisierung aller Aspekte des Fährbetriebs – vom Ablegen bis zum Anlegen. Die Demonstration dieser Technologien an der Autofähre Wittow im Küstenbereich der Ostsee zwischen Rügen und Hiddensee wird zeigen, wie weit die Automatisierung in der Schifffahrt fortgeschritten ist und wie sie zur Effizienzsteigerung und Sicherheitserhöhung im Fährbetrieb beitragen kann.