
Aus unserem BLOG • Von Marcel Sonntag, innocam.NRW • Juli 2022
Hi-Drive – Komplexe Herausforderungen bei der Einführung höherer Automatisierung im Visier
Entscheidend für die Markteinführung von Systemen mit SAE Level 3 oder höher ist die Erprobung und kontinuierliche Weiterentwicklung automatisierter Fahrzeuge. So können Betriebsbereiche erweitert und das volle Potential des automatisierten Fahrens ausgeschöpft werden. Durch die Bündelung der Aktivitäten verschiedener Fahrzeughersteller, Zulieferer und Forschungsinstitute können zudem die Auswirkungen des automatisierten Fahrens basierend auf realen Daten systematisch analysiert werden. Das länderübergreifende Vorhaben Hi-Drive hat dazu ein Konsortium aufgestellt, das die zentralen Herausforderungen aufgreift, die derzeit den Fortschritt der Entwicklungen in der Fahrzeugautomatisierung behindern.
Das ambitionierte EU-Projekt hat sich zum Ziel gesetzt, das automatisierte Fahren hin zu höhere Automatisierungsgrade zu bringen. Dabei sollen die automatisierten Fahrfunktionen robust und zuverlässig sein und die ODDs (Operational Design Domain) erweitert und defragmentiert werden. Bei der ODD handelt es sich um:
“Operating conditions under which a given driving automation system […] is specifically designed to function […] to environmental, geographical, and time-of-day restrictions, and/or the requisite presence or absence of certain traffic or roadway characteristics.” [SAE J3016 – 2021]).
Darüber hinaus nimmt die Interoperabilität zwischen verschiedenen Ländern und Fahrzeugherstellern eine wichtige Rolle ein.
Nach erster Pilotierungsphase – Wo setzt Hi-Drive heute auf?
Hi-Drive ist aus einer Historie an Projekten gewachsen. Der direkte Vorgänger ist das EU-Projekt L3Pilot. Hier wurden hauptsächlich Level-3-Funktionen mit Sicherheitsfahrern auf öffentlichen europäischen Straßen erprobt. Dabei legten etwa 750 Personen in über 70 Fahrzeugen rund 400.000 km sowohl auf Autobahnen als auch im urbanen Raum zum Teil grenzüberschreitend zurück. Neben den Funktionen zum Manövrieren im Straßenverkehr wurden zudem automatisierte Parkfunktionen getestet.
Ausgiebiges Testen ermöglicht es, Herausforderungen zu ermitteln, die einer Markteinführung von automatisierten Fahrzeugen noch im Wege stehen. So sind die ODDs zum einen durch bestimmte Umstände fragmentiert bzw. unterbrochen. Dies kann zum Beispiel vorliegen, wenn kein hinreichend genaues GNSS-Signal verfügbar ist und die Lokalisierung entsprechend ungenau ist. Gleichzeitig sind die ODDs aber auch eingeschränkt, so dass zum Beispiel Autobahnabfahrten, die erhöhte Interaktion mit anderen Verkehrsteilnehmern erfordern, noch nicht berücksichtigt werden.
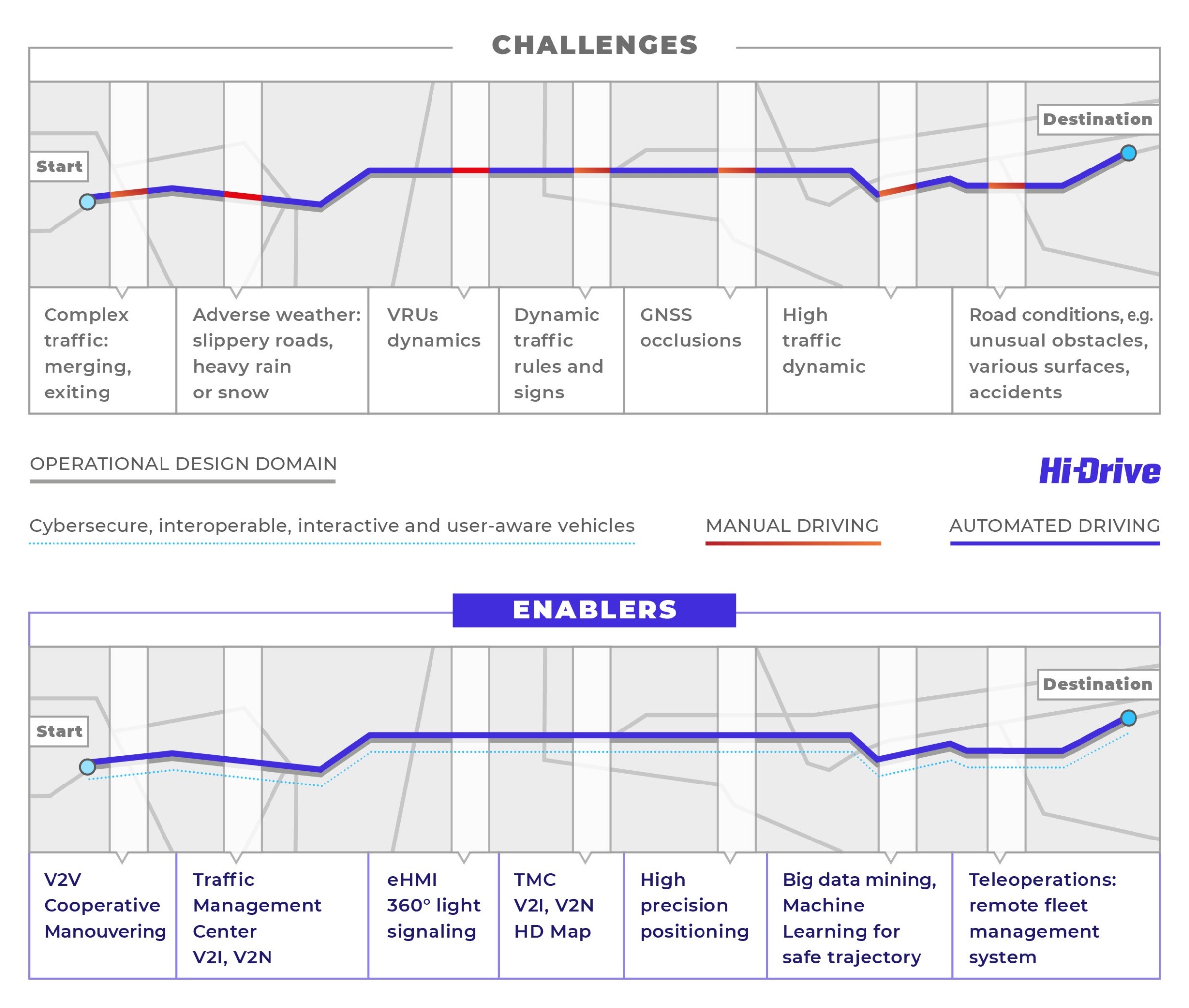
Entwicklung und Implementierung innovativer Enabler für robustes automatisiertes Fahren
Mit Hi-Drive sollen diese Lücken durch den Einsatz neuer Technologien geschlossen werden. Im Projekt werden diese Technologien als „Enabler“ bezeichnet. Sie sollen im Projekt entwickelt und in die bestehenden Fahrfunktionen integriert werden.
Robustes, automatisiertes Fahren mit defragmentierten ODDs soll dabei unter anderem ermöglicht werden durch:
- Widerstandsfähigkeit gegenüber Cyber-Bedrohungen
- Interoperabilität: Fahrzeuge verschiedener Marken, einschließlich Lastkraftwagen, kommunizieren miteinander (V2V für kooperative Wahrnehmung und kooperatives Manövrieren)
- Interaktive Fahrzeuge: Automatisierte Fahrzeuge kommunizieren und interagieren mit vulnerablen Verkehrsteilnehmern (VRUs, z.B. Fußgänger)
- HMI (Mensch-Maschine-Schnittstelle): Driver Monitoring unterstützt das Situationsbewusstsein des Fahrers/Bedieners
- Erweitertes Sichtfeld: Das automatisierte Fahrzeug empfängt Informationen (V2I, HD-Karten), um sich an den Verkehr außerhalb des Sichtbereichs anzupassen
- Präzise Lokalisierung zur Kompensation von GNSS-Beeinträchtigungen
- Einsatz von Schlüsseltechnologien wie Big Data, IoT, Machine Learning (ML) und Teleoperationssystemen
Parallel zur Implementierung der Funktionen werden Methoden entwickelt, um die Effekte auf das Verkehrssystem zu analysieren. Diese Methoden werden nach erfolgter Implementierung und Einbau angewandt. So werden die automatisierten Funktionen auf Teststrecken sowie im realen Verkehr und auch grenzüberschreitend erprobt und Daten zu den Systemen gesammelt. Diese Daten werden dann genutzt, um zum einen die Funktionen an sich zu untersuchen, aber vor allem auch, um die Auswirkungen des automatisierten Fahrens mit den Enablern unter anderem auf die Verkehrssicherheit und den Verkehrsfluss hin zu untersuchen und Kosten-Nutzen-Abschätzungen dieser Systeme durchzuführen. Dafür werden insbesondere eine Szenarien- sowie eine Edge Case-Datenbank zur Unterstützung der Analysen und vertiefender Simulationen aufgebaut. Flankierend finden unterstützende Nutzerstudien statt, die unter anderem den Komfort für die Insassen sowie die allgemeine Akzeptanz von Menschen den Systemen gegenüber untersuchen.
Roadshow-Serie gibt interessante Einblicke in ausgewählte Highlights der laufenden Forschungsarbeiten
Die Highlights der Forschungsarbeiten werden in einer spannenden Roadshow-Serie festgehalten. Nachdem im Januar 2023 automatisiertes Fahren auf Lapplands verschneiten Straßen ohne sichtbare Fahrbahnmarkierungen getestet wurde, ging es im Juni in Deutschlands längsten Straßentunnel. Die Herausforderung hier: sicher autonom fahren trotz des Verlustes von GPS-Signalen. Film ab!
Lappland, Januar 2023: Verschneite Straßen ohne sichtbare Fahrbahnmarkierungen, schneebedeckte Verkehrsschilder und turbulenter Schnee, der die Sensoren stört, stellen ganz besondere Anforderungen an das automatisierte Fahren dar. Im Januar 2023 wurde ein von Bosch entwickelter Enabler in einem automatisierten Fahrzeug der VTT demonstriert. Die gesammelten Daten werden vom Institut für Kraftfahrzeuge (ika) – RWTH Aachen University analysiert, um die Auswirkungen des automatisierten Fahrens unter diesen Bedingungen zu bewerten.
Thüringen, Juni 2023: Auch Autobahntunnel bringen eine Vielzahl von Herausforderungen mit sich. Dazu gehören der Verlust des GNSS-Signals, plötzliche Hell-Dunkel-Übergänge, schlechte Kamerasicht wegen künstlicher Beleuchtung und das erhöhte Unfallrisiko aufgrund der eingeschränkten Geometrie des Tunnels. Während der Live-Demonstration zeigte Valeo Deutschland, wie diese Hürden mithilfe von LiDAR-Lokalisierung gemeistert werden können. Die gesammelten Daten werden auch hier analysiert, um zu bewerten, inwiefern der Enabler diese Herausforderungen bewältigt.
Erfahrene Akteure automatisierten Fahrens aus NRW bringen Expertise in das Team aus
40 Partnern ein
Das Projekt ist im Juli 2021 gestartet und läuft für vier Jahre mit einem Budget von 60 Mio. € (davon 30 Mio. € Förderung der Europäischen Union im Rahmen des Horizon 2020 Programms). Während dieser Zeit entwickeln 40 Partner aus 14 Ländern die Zukunft des automatisierten Fahrens. Zahlreiche OEMs, Zulieferer, Forschungsinstitute und weitere Einrichtungen arbeiten Hand in Hand an der Umsetzung und Auswertung. Ausgewiesenes Know-how aus NRW bringen Ford, Aptiv, FEV, DLR und das Institut für Kraftfahrzeuge der RWTH Aachen in das Vorhaben ein.
