Motivation
Ziel und Motivation von AUTOtech.agil ist es, eine offene Architektur für das Mobilitätssystem der Zukunft zu schaffen, sowohl für neuartige als auch für etablierte Fahrzeug- und Mobilitätskonzepte. Dazu gehört die Aufgabe, eine offene Software- und E/E-Architektur mit den dazugehörigen Werkzeugen und Methoden zu entwickeln. Ein besonderes Augenmerk liegt dabei auf der Standardisierung von Schnittstellen sowie der Modularisierung mit dem Ziel der Wiederverwendbarkeit, Aktualisierbarkeit und Erweiterbarkeit einzelner Funktionsbausteine. Dieses Baukastenprinzip aller notwendigen Soft- und Hardwareelemente für Fahrzeuge aller Art ermöglicht es, Ergänzungen und Erweiterungen in Forschung, Entwicklung, Produktion und vor allem in der Nutzungsphase einfach zu realisieren.Die im Vorgängerprojekt UNICARagil erforschte und entwickelte Architektur für fahrerlose Fahrzeuge bildet dafür eine wertvolle Grundlage. Sie diente unter anderem als Orientierung für die Gesetzgebung und spiegelt sich in den Rahmenbedingungen des Gesetzes zum autonomen Fahren wider, das im Juli 2021 in Kraft trat.Im Nachfolgeprojekt AUTOtech.agil erweitert das gewachsene Konsortium diese Architektur nun auf das gesamte Verkehrssystem, insbesondere in den Bereichen Software und Tools für die Softwareentwicklung. Auch die infrastrukturbasierte Sensorik und kooperative Konzepte unter Einbindung von Leitzentralen und der Cloud werden vertieft erforscht.Das Projekt beinhaltet unter anderem drei Anwendungsbeispiele, um die Konzepte und deren Mehrwert für die gesamte Gesellschaft zu demonstrieren:- Mobilität für Menschen mit alters- oder krankheitsbedingten Leistungseinschränkungen- Der nachhaltige Transport von kritischen Gütern wie Medikamenten- Eine "Schutzengel"-Funktion für mehr Sicherheit von so genannten Vulnerable Road Users (VRUs), zum Beispiel Fußgängern oder Radfahrern
Geplante Projektergebnisse
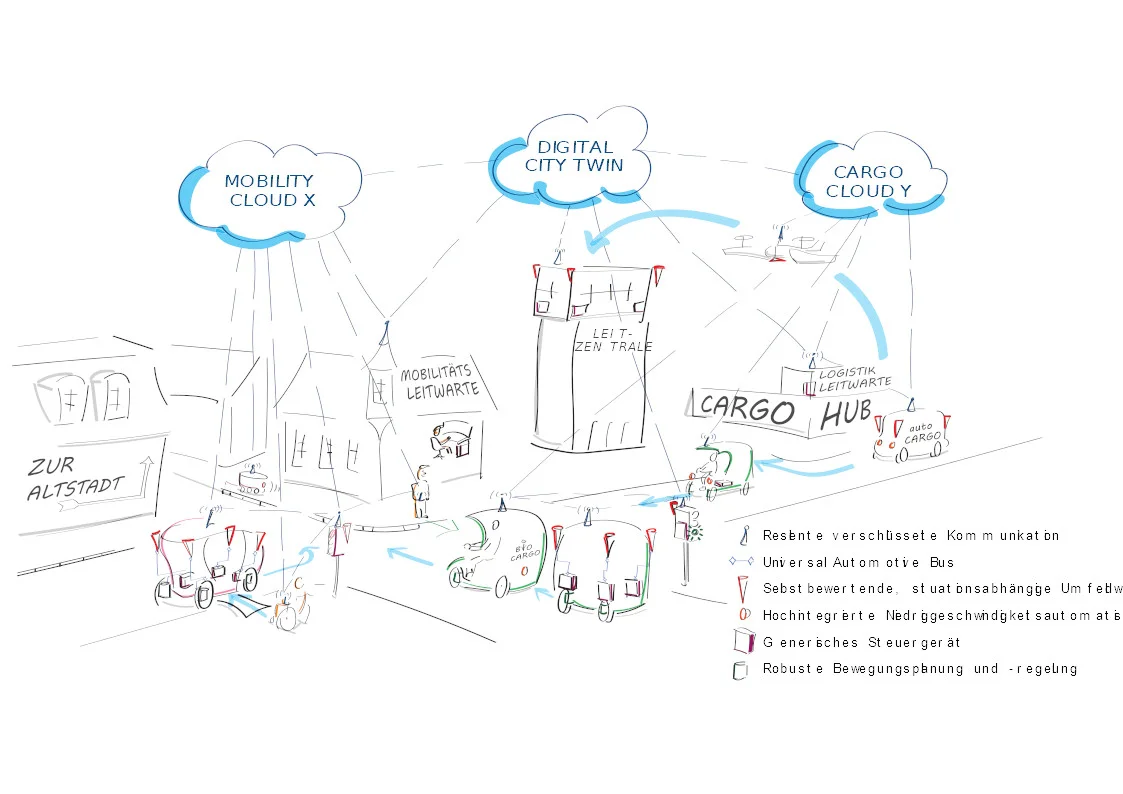
In AUTOtech.agil soll die in UNICARagil entwickelte diensteorientierte Softwarearchitektur ("Automotive Service-oriented Software Architecture", ASOA) über die Systemgrenze des Fahrzeugs hinaus erweitert werden. Dies ermöglicht die Verteilung von Intelligenz durch Orchestrierung von Diensten innerhalb und außerhalb des Fahrzeugs. Zu den fahrzeugexternen Komponenten gehören infrastrukturbasierte Sensoren wie Road Side Units (RSUs) sowie Leitzentralen und Clouds.Die Erkennung, Diagnose und Vorhersage von Fehlern ermöglicht in Kombination mit einer Over-the-Air-Updatefähigkeit kurze Innovationszyklen durch agile Updates und Upgrades. Das heterogene Gesamtsystem kann so jederzeit auf einem sicheren Niveau gehalten werden.Neuromorphe Hard- und Software ermöglichen maschinelles Lernen und nachhaltige Umgebungswahrnehmung auf einem neuen Niveau der Energieeffizienz.Entwurf, Validierung, Nutzung und Wartung diensteorientierter E/E-Architekturen werden durch die Schaffung und Bereitstellung einer Entwicklungsplattform mit entsprechenden Software-Tools vereinfacht.Als universelle, skalierbare und echtzeitfähige Schnittstelle erhöht der Universal Automotive Bus (UAB) die Interoperabilität und reduziert die Komplexität der Systemintegration.Lernende vernetzte Verkehrsintelligenz ermöglicht es, die Sicherheit und Effizienz des Straßenverkehrs zu erhöhen. Leitzentralen können auf einen digitalen Live-Zwilling des aktuellen Verkehrs zurückgreifen. Durch die Vernetzung kann der Entscheidungsprozess in automatisierten Fahrzeugen um kooperative Formen der Entscheidungsfindung erweitert werden.Eine robuste Fahrzeugautomatisierung auf Basis eines modularen Baukastens von Funktionsmodulen berücksichtigt Unsicherheiten, repräsentiert in Qualitätsvektoren, entlang der gesamten Wirkungskette – von der Umfeldwahrnehmung bis zur probabilistischen Trajektorienplanung und -regelung.Die projektweite Dokumentation der Sicherheitsaktivitäten im Zusammenspiel aller Komponenten und Module dient der Beschreibung von Unsicherheiten und dem Dialog über erreichbare Sicherheitsniveaus. Ein modularer Homologationsprozess soll Software-Updates im laufenden Betrieb ermöglichen.Eine Public-Key-Infrastruktur (PKI) sorgt für sicheren Datenaustausch. Basierend auf den probabilistischen Funktionsmodulen für die Fahrzeugautomatisierung wird ein Monitoring-Framework zur ganzheitlichen Selbstwahrnehmung mittels Qualitätsbewertung geschaffen und eine Fähigkeitenbewertung auf Gesamtsystemebene ermöglicht.Das Projekt befindet sich zum jetzigen Zeitpunkt in der Halbzeit. Eine Abschlusspräsentation von AUTOtech.agil ist geplant für September 2025 in Hamburg. Dort sollen die erzielten Ergebnisse unter anderem in verschiedenen Demos präsentiert werden und das Mobilitätssystem der Zukunft den Besuchern erlebbar gemacht werden.
Sie haben Fragen zu diesem Thema? Wenden Sie sich gerne an uns per Mail unter info(at)innocam.nrw oder telefonisch unter 0241 80 25630.
Quellen